


Alphabet çatısı altında faaliyet gösteren Waymo, Google’ın çok modlu büyük dil modeli (MLLM) olan Gemini’yi otonom araç eğitimi için kullanarak robotaksi teknolojisini bir adım ileri taşımayı planlıyor.
EMMA modeli ile gelecek yönlendirme
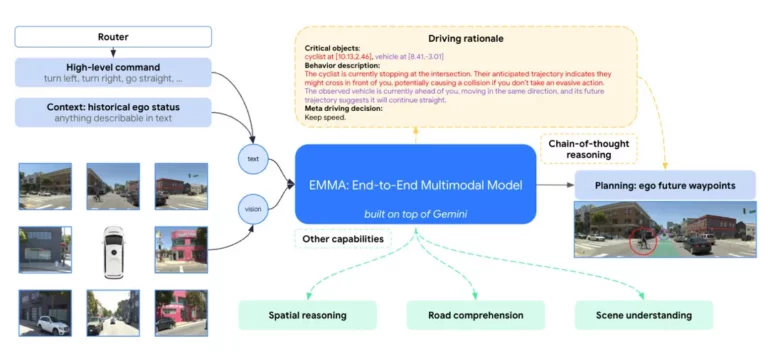
Waymo, “End-to-End Multimodal Model for Autonomous Driving” (EMMA) adını verdiği yeni bir araştırma modeli geliştirdiğini duyurdu.
EMMA, araç sensör verilerini işleyerek otonom araçlar için gelecek rotaları belirleyebiliyor ve bu sayede sürücüsüz araçların yolculuk rotalarını güvenli şekilde oluşturmasına katkı sağlıyor. Waymo’nun bu çalışması, yapay zeka modellerinin chatbot, e-posta yönetimi veya görüntü oluşturma gibi bilinen alanların ötesinde kullanılabileceğine dair önemli bir işaret olarak kabul ediliyor.
Araştırma, otonom sürüş sistemlerinin tarihsel olarak farklı işlevler için (algılama, haritalama, tahmin ve planlama gibi) ayrı modüller geliştirdiğini belirtiyor. Ancak bu yapı, modüller arasındaki sınırlı iletişim ve ölçeklenme zorlukları nedeniyle yeni ortamlara adapte olma konusunda sıkıntı yaşanmasına neden olabiliyor. Waymo,
Gemini gibi çok modlu modellerin bu eksiklikleri giderme potansiyeli taşıdığını öne sürüyor.
Waymo’nun rekabetteki konumu
Waymo, EMMA modelini robotaksilerini karmaşık ortamlarda yönlendirme aracı olarak tasarladı. Bu modelin başarıyla kullandığı alanlardan biri, araçların yolda karşılaşabilecekleri hayvanlar veya yol çalışmaları gibi engelleri atlatabilme yetisi oldu.
Waymo’nun ana rakiplerinden Tesla da benzer şekilde “uçtan uca nöral ağlar” kullanan yeni bir otonom sürüş modeli geliştirdiğini açıklamıştı. Ancak Tesla’nın aksine, Waymo, robotaksileriyle gerçek yol deneyimlerinde daha güçlü bir pozisyona sahip.
Waymo, EMMA’nın nesne algılama, rota tahmini ve yol ağı haritasını anlama gibi konularda yüksek performans gösterdiğini belirtti. Şirket, bu tür bir araştırma sayesinde otonom sürüşte daha fazla temel işlevin birleştirilebileceği bir gelecek hedeflediklerini ifade ediyor.

Teknolojinin sınırları ve gelecekteki araştırmalar
Her ne kadar EMMA önemli bir adım olsa da modelin sınırlamaları bulunuyor. Lidar veya radar gibi 3D sensör girdilerini işleyememesi ve yalnızca sınırlı sayıda görüntü karesi üzerinde çalışabilmesi bu kısıtlamalardan bazıları.
Ayrıca, sohbet modelleri bazen hatalı yanıtlar verebiliyor; bu durum, yüksek hızla seyreden otonom araçlar için ciddi riskler oluşturabileceği için bu tür modellerin sürüş sistemlerine entegre edilmesi konusunda ek araştırmalara ihtiyaç duyuluyor.
Waymo’nun araştırma ekibi, sonuçlarının daha ileri araştırmaları teşvik edeceğine ve otonom sürüş modellerinin mimarisinde gelişmeler sağlayacağına inandıklarını belirtti.




{kind=link}