


Texas A&M Üniversitesi’ndeki araştırmacılar, her türlü arazi ortamında robotik kullanımında önemli bir adım atarak, sikloidal tekerleklere sahip bir robot geliştirdiler. Mühendislik Teknolojileri ve Endüstriyel Dağıtım Bölümü’ndeki Uyarlanabilir Robotik ve Teknoloji Laboratuvarı, en son çığır açan buluşu olan Sikloidal Artırılmış Tekerlek’i (CLAW) geliştirdi. Bu benzersiz sistem, robotun düz yüzeylerde tekerlek hareketini pürüzsüz bir şekilde sürdürürken, engelleri aşmak için tırmanma hareketine zahmetsizce geçiş yapmasını sağlıyor.
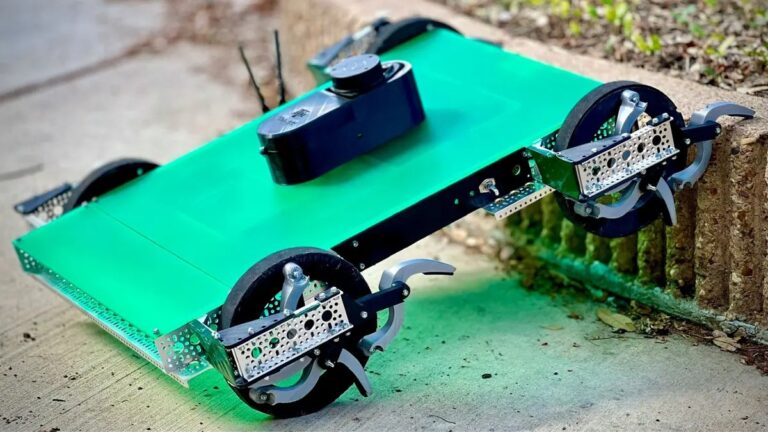
Sikloidal tekerlekli arazi robotu
Mühendislik Teknolojisi ve Endüstriyel Dağıtım Bölümü’nde doçent olan Dr. Kiju Lee ve Makine Mühendisliği Bölümü’nden J. Mike Walker, ’66, makine mühendisliği doktora öğrencisi Yuan Wei ile birlikte CLAW’u geliştirdiler. Lee’nin araştırma ekibi, 2020-2021 yılları arasında DARPA tarafından finanse edilen bir proje için Uyarlanabilir Tekerlek ve Bacak Dönüştürülebilir Robot’u (a-WaLTR) geliştirdi.


α-WaLTR, ihtiyaç halinde tekerlekleri veya bacakları kullanarak, insan yardımı olsun veya olmasın, merdivenler de dahil olmak üzere çeşitli yüzeylerde hareket edebilir. Lee, robotlardaki yer hareketini iyileştirmek için α-WaLTR’yi yarattı. Tekerlek ve bacaklar arasında geçiş yapan a-WaLTR’nin aksine, CLAW mekanizması paletli veya geleneksel tekerlekli robotlara uyarlanabilir.
ABD Tarım Bakanlığı Ulusal Gıda ve Tarım Enstitüsü, başlangıçta çeşitli tarımsal durumlar için ölçeklenebilir ve uyarlanabilir bir robot sürüsü geliştirmeye odaklanan Ulusal Robotik Girişimi 3.0 girişimi aracılığıyla çalışmayı finanse etti.
CLAW ile bu robotlar, tarım alanlarının farklı topografya ve hava koşullarıyla başa çıkabiliyor. PENÇE, yükseklere ulaşmak için uzar ve yere yaklaştığında geri çekilir, böylece tekerleğin yüzeyle sürekli temas halinde kalması sağlanıyor.Tasarım ayrıca arama ve kurtarma, afet müdahalesi ve askeri görevlerde robotların kullanımını da genişletebilir. Wei’nin her ikisi de doktor olan ebeveynleri tekerlekli sandalyelerde potansiyel uygulamalar gördüler.
Robot, çoklu arazi hareketliliğinin yanı sıra güvenilir engel ve merdiven tırmanma özelliği de sergiledi. CLAWbot, tekerlekli robot kontrolü, yerelleştirme ve navigasyon konusundaki önceki araştırmalara dayanarak, kendi kendine çalışma yeteneklerini geliştirmek için sağlam bir çerçeve sunuyor.